云服务器安装使用ros的步骤是什么?

随着云计算技术的飞速发展,云服务器已成为众多开发者和系统管理员不可或缺的工具之一。特别是对于需要大量计算资源的机器人操作系统ROS(RobotOperatingSystem),云服务器提供了一个灵活、可扩展的平台。本文将详细介绍云服务器安装使用ROS的步骤,并提供实用的技巧和常见问题解决方案,以助您顺利搭建环境。
一、选择合适的云服务器提供商
在安装ROS之前,选择一个可靠的云服务器提供商是首要步骤。国内外有许多知名的云服务商,如阿里云、腾讯云、亚马逊AWS、谷歌云平台等。根据以下标准选择:
性价比:考虑服务器配置与价格的比值。
服务器稳定性:选择口碑好、服务质量高的服务商。
可扩展性:考虑是否易于升级服务器资源。
地域选择:选择距离您目标用户群近的服务器区域,以减少延迟。
服务支持:确保提供商能提供有效的技术支持。
选择完毕后,您可以通过官方网站购买云服务器服务并创建实例。
二、远程连接云服务器
云服务器购买完毕后,您需要远程连接到服务器。在Windows系统中,可以使用PuTTY工具;在Mac和Linux系统中,可以使用SSH客户端。
连接步骤:
1.获取服务器的公网IP地址和端口号。
2.输入服务器的用户名和密码。
3.连接成功后,您将进入云服务器的命令行界面。
三、更新系统软件包
在安装任何软件之前,首先确保系统软件包是最新的。可以通过以下命令更新:
```bash
sudoapt-getupdate
sudoapt-getupgrade
```
四、安装ROS
ROS的安装过程因版本和操作系统而异,以Ubuntu系统为例,以下是安装ROSMelodic的步骤:
安装步骤:
1.设置软件源:
```bash
sudosh-c'echo"debhttp://packages.ros.org/ros/ubuntu$(lsb_release-sc)main">/etc/apt/sources.list.d/ros-latest.list'
```
2.添加密钥:
```bash
sudoapt-keyadv--keyserver'hkp://keyserver.ubuntu.com:80'--recv-keyC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
```
3.更新软件包列表,并安装ROS:
```bash
sudoapt-getupdate
sudoapt-getinstallros-melodic-desktop-full
```
4.为了使用ROS环境,需要初始化rosdep:
```bash
sudorosdepinit
rosdepupdate
```
5.设置环境变量,使ROS命令可以全局使用:
```bash
echo"source/opt/ros/melodic/setup.bash">>~/.bashrc
source~/.bashrc
```
五、安装额外的ROS工具
安装完成后,您可能还需要安装一些额外的工具来帮助开发,例如ROS的构建工具catkin:
```bash
sudoapt-getinstallpython-catkin-tools
```
六、创建ROS工作空间
通常您需要创建一个工作空间来存放您的ROS项目:
```bash
mkdir-p~/catkin_ws/src
cd~/catkin_ws/
catkin_make
echo"source~/catkin_ws/devel/setup.bash">>~/.bashrc
source~/.bashrc
```
七、验证ROS安装
确保ROS安装成功,运行以下命令:
```bash
roscore
```
如果看到相关的启动信息,说明ROS已经成功安装并运行。
八、常见问题与解决方案
如果在安装过程中遇到网络问题,可以尝试更换apt源或使用代理。
如果遇到权限问题,检查是否使用了sudo命令。
如果roscore无法启动,检查是否有端口冲突或ROS环境变量是否正确设置。
九、结语
通过以上步骤,您应该能够在云服务器上成功安装并运行ROS。无论您是进行机器人研究、开发教学还是个人兴趣实践,云服务器为ROS提供了一个强大且灵活的工作环境。本文为您详细介绍了安装和设置的每一步骤,希望对您有所帮助。未来,您可以在此基础上进一步学习ROS的更多高级功能和应用。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 3561739510@qq.com 举报,一经查实,本站将立刻删除。!
本文链接:https://www.yxbdsz.com/article-9886-1.html
相关文章
最新文章
-

平板手写笔搭配华为键盘使用方法是什么?使用中遇到问题怎么办?
2025-04-26 -
卫星机顶盒信号接口更换方法是什么?
2025-04-26 -

房车宽带安装路由器的视频教程?
2025-04-26 -
机甲移动硬盘盒拆卸方法是什么?
2025-04-26 -

频繁更换苹果充电器的原因是什么?
2025-04-26 -
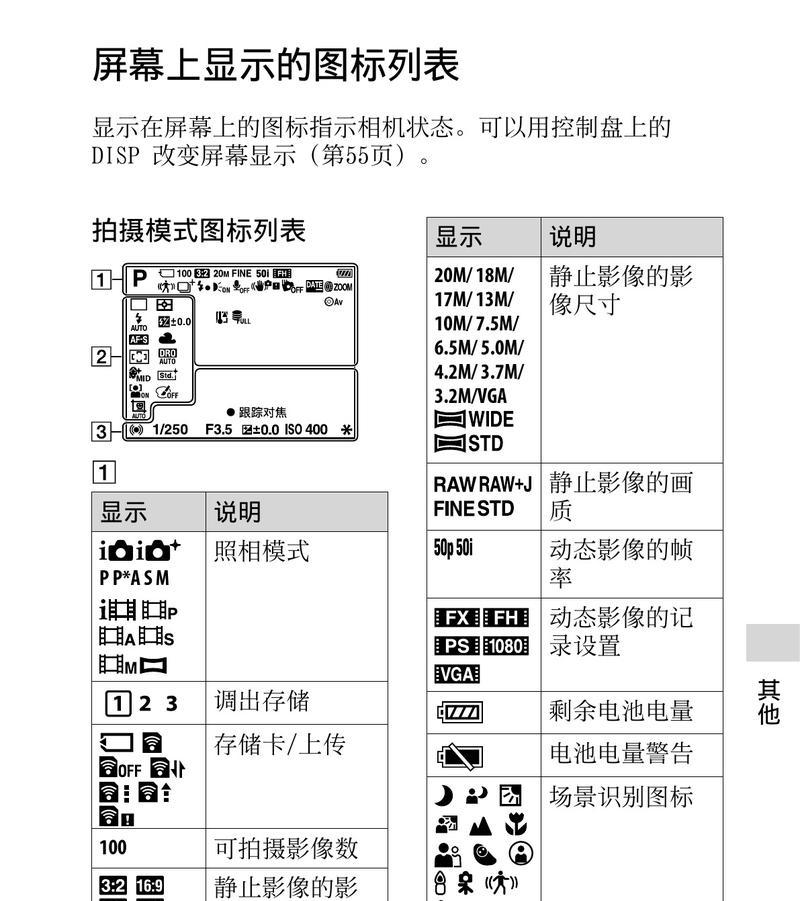
索尼旗舰机相机如何删除照片?操作流程是怎样的?
2025-04-26 -

燃气热水器a2设置功能介绍?
2025-04-26 -
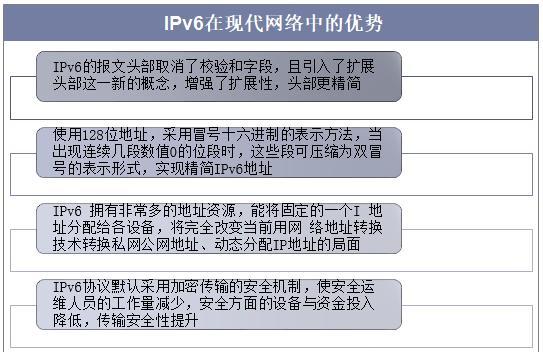
电视机顶盒怎么获取ipv6?获取ipv6的步骤是什么?
2025-04-26
热门文章
-
有线耳机无声怎么办?电脑声音设置正确吗?
2025-03-28 -

投影仪背景图片清理不掉怎么办?
2025-04-08 -

电脑出现怪兽图标应如何处理?
2025-04-08 -

幻想小音箱连接蓝牙失败怎么办?
2025-04-14 -

音箱人的音响使用技巧?如何正确折叠音响?
2025-04-16 -

iPad平板电脑按键失灵的原因是什么?
2025-04-13 -
德国科技航空电风扇的性能如何?它有哪些特点?
2025-04-16 -

热水器出水断水怎么安装?安装过程中的常见问题有哪些?
2025-04-15